RLG Iki okly indeksli inertial nawigasiýa ulgamy




Önümiň beýany
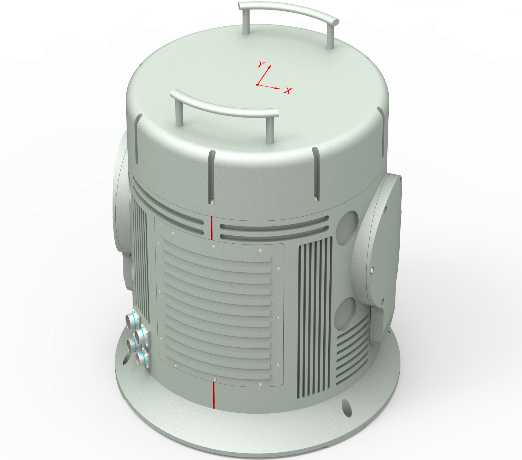
RL2-90 Inertial nawigasiýa ulgamy, takyk nawigasiýa üçin iň esasy çözgüt.90 görnüşli halka lazer giroskopy we kwars çeýe akselerometr bilen enjamlaşdyrylan, takyk tizlik, pozisiýa we garaýyş maglumatlary berýär.GNSS, altimetrler we howa tizlikli metrler bilen üznüksiz birleşýär we howa we ýerüsti göterijiler üçin amatly bolýar.Tanklarda, sowutly ulaglarda, uçarlarda, pilotsyz uçarlarda, gämilerde ýa-da ýokary tizlikli demir ýolda bolsun, bu ulgam ygtybarly uçuş gözegçiligini, garaýşyň durnuklaşmagyny we ýerleşişini üpjün edýär.Arassa inertial nawigasiýa we toplumlaýyn nawigasiýa reesimlerinde ýokary takyklyk bilen, RL2-90 dürli programmalarda ygtybarly we takyk nawigasiýa üçin ygtybarly hyzmatdaşyňyzdyr.
PÖNÜMLER
l erroralňyşlygy azaltmak üçin iki okly indeksleme mehanizmi
l precokary takyklyk halkasy lazer gyro we kwars akselerometri
l Meýletin statiki ýa-da hereketlendiriji esas öz-özüňi düzmek
l roralňyşlyk parametrleriniň kalibrlemesi we doly temperatura aralygynda kompensasiýa
l GNSS / Odometer / DVL üçin goşmaça dürli giriş interfeýsleri
l Düzülip bilinýän nawigasiýa tertibi
l Daşky gurşawyň amatlylygy
l Harby standartlar
AGÖRNÜŞ ARERLERI
l Deňiz astyndaky ulag nawigasiýasy
l gury ýer ulagynyň ýerleşişi we demirgazykda tapylmagy
l Hereket edýän daşaýjy üçin durnuklaşdyryş we gözegçilik
l Programmalary talap etmek üçin garaýyş ölçegi
MAIN funksiýalary
l Daşaýjynyň ýagdaýy, sözbaşy, garaýyş burçy, burç tizligi we tizligi ýaly maglumatlary çykarmak funksiýasyna eýedir;
l Arassa inertial nawigasiýa we INS / GNSS (Beidou hem goşmak bilen) integrirlenen nawigasiýa ýaly iş tertibi bar;
l Daşarky wagt ulgamynyň ýygylygy standart enjamlary bilen üpjün edilen hemra nawigasiýa maglumatyny almak funksiýasyna eýe bolmak;
l grounderiň öz-özüni deňleşdirmek funksiýasyna eýedir we howany deňleşdirmek funksiýasyny goldaýar;
l Öz-özüňi barlamak, wagtal-wagtal öz-özüňi barlamak, ýagdaý hasabaty, gurnama ýalňyşlygynyň öwezini dolmak we üýtgemeýän saklamak ýaly funksiýalary bar.
PRAL .YŞLYK görkezijileri
| Ulgam takyklygy Ulgam takyklygy | Arassa inertial nawigasiýa / Arassa inertial nawigasiýa | 2.0nmile / 5d, PEAK | |
| GNSS bilen toplumlaýyn nawigasiýa / nawigasiýa | ≤5m, 1σ | ||
| Ingoluň burçy / sözbaşy | 0.01 °, RMS | ||
| Gorizontal garaýyş (rulon we meýdança) Gorizontal garaýyş (rulon we meýdança) | 0.005 °, RMS | ||
| Arassa inertial tizlik | 1,0 m / s, RMS | ||
| GNSS Toplumlaýyn nawigasiýa tizligi | 0. 1 m / s, RMS | ||
| Görkezijiler inertial enjamlar Gyro we Accelerometer Parametrleri | lazer giroskopy Gyroskop | Aralyk / aralyk | 00 6 00 deg / s |
| Ikitaraplaýyn durnuklylyk | ≤0.002 deg / sag, 1σ | ||
| Ikitaraplaýyn gaýtalanma | ≤0.002 deg / sag, 1σ | ||
| Tereziniň faktory çyzykly däl | 1 ppm | ||
| Akselerometr Akselerometr | Aralyk / aralyk | ± 15g | |
| Ikitaraplaýyn durnuklylyk | ≤10μg, 1σ | ||
| Nol ikitaraplaýyn gaýtalanma Ikitaraplaýyn gaýtalanma | ≤10μg, 1σ | ||
| Tereziniň faktory çyzykly däl | 15 ppm | ||
| wagty deňleşdirmek Düzediş wagty | Sowuk başlangyç | ≤ 15 min | |
| Gaýtadan başla | ≤ 10 min | ||
| Howa / Uçuş başlangyjy | Min15min | ||
| Iş sagatlary Işleýiş wagty | Üznüksiz iş wagty / Iş wagty | 10s-dan köp | |
| Interfeýs aýratynlyklary interfeýsi | Naprýatageeniýe / naprýa .eniýe | 18 ~ 36VDC | |
| Kuwwat sarp etmek | ≤ 40W @ 24VDC | ||
| Elektrik interfeýsi / Elektrik | RS232 × 2 RS422 × 3 CAN × 2 Ethernet × 1 1pps × 1 | ||
| Maglumatlaryň täzeleniş tizligi (sazlap bolýan) | 200Hz@115.2kbps | ||
| Daşky gurşawy ulanyň Daşky gurşaw | Işleýiş temperaturasy | -40 ° C ~ + 65 ° C. | |
| Saklaýyş temperaturasy / Saklaýyş temperaturasy | -55 ° C ~ + 85 ° C. | ||
| Altitude / Altitude ulanyň | 20000m | ||
| Çyglylyk | 95% (+ 25 ° C) | ||
| Wibrasiýa / Wibrasiýa | 5g @ 20 ~ 2000Hz | ||
| Şok / urmak | 40 g, 11 ms, 1/2 Sine | ||
| Fiziki aýratynlyklary Fiziki | Ölçegleri / Ölçegi (Φ * H) | 540 x 536mm | |
| Agram / agram | 55 kg | ||
Bellik: Gurluşy ulanyjynyň talaplaryna laýyklykda düzüp bolýar.